Hi, I'm Jorge
A first-generation Colombian engineer and PhD candidate in Robotics at Purdue University. Passionate about biomedical applications, I build smarter control systems for ankle-foot prostheses. I enjoy the full stack of engineering when it drives real social impact. I can go from control theory on paper to embedded code on hardware. Outside the lab, you'll find me mentoring students, assembling Lego sets, or finding my way to all seven wonders of the world.


Projects
Publications
Teaching
Resume

Projects
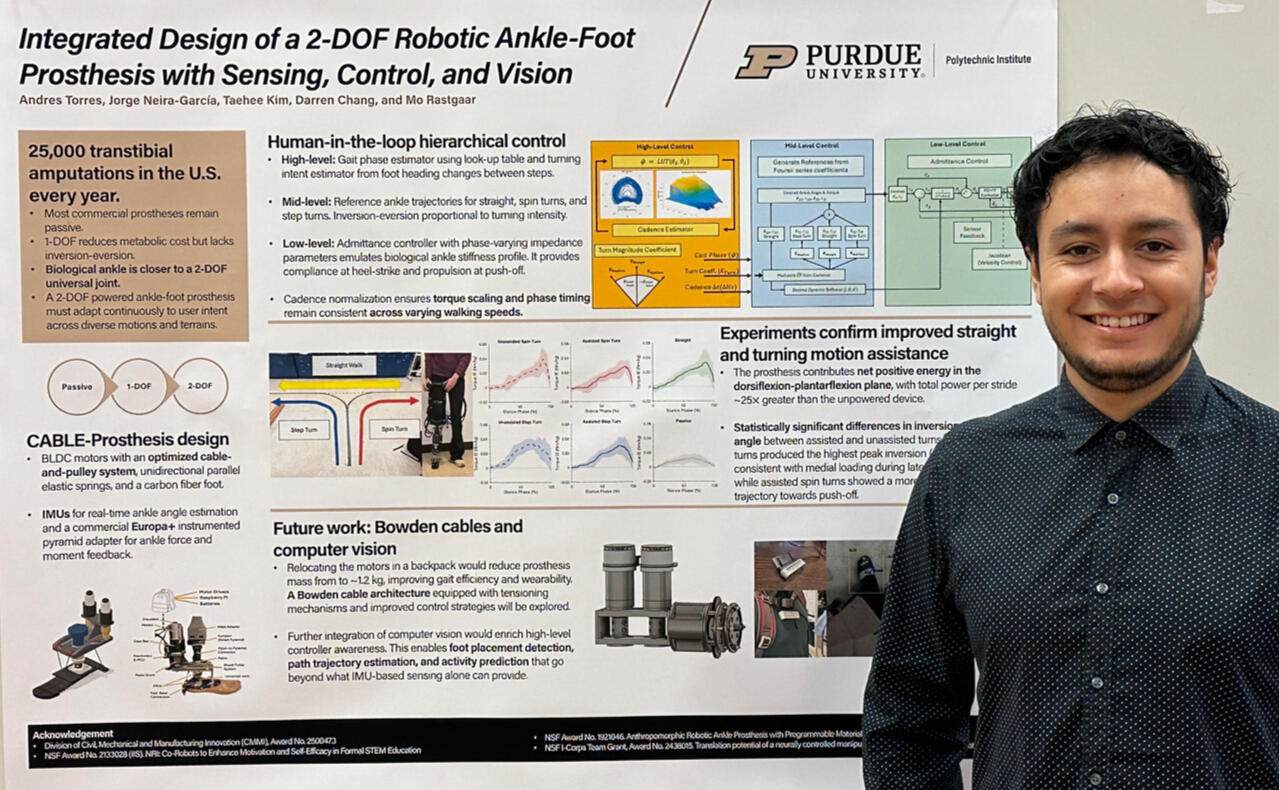
2-DOF Ankle-Foot Prosthesis
This is my main Ph.D. project, and it includes multiple lines of action:
Selection and integration of hardware and software for a new prosthesis design.
Design and implementation of an adaptive control architecture for uneven terrains.
Development of a device-level multibody simulation for control design.
Calibration and evaluation of a wireless instrumented pyramid adapter for ankle force and moment estimation.
Motor Control Interface for the 2-DOF Ankle-Foot Prosthesis
Designed custom electronics and embedded firmware for motor control and sensor interfacing.
Interfaced an STM32 F446RE with a Maxon ESCON 70/10 using custom encoder and analog signal-conditioning circuits.
Designed a Nucleo expansion board with CAN, I²C, UART, and debugging interfaces, eliminating breadboard wiring.
Designed a compact 50×50 mm STM32-based embedded system integrating motor control, communications, and analog interface.
Developed embedded C++ firmware, peripheral drivers, and ROS 2 serial communication.
Research-Oriented Underwater Glider (ROUGHIE)
A six-month research experience at Nina Mahmoudian Lab, working on:
Development of path planning algorithms.
Evaluation of heading control and trajectory tracking using motion capture.
Design and execution of experimental protocols in real-world environments.
Troubleshooting of hardware and software modules.
Autonomous Package-Delivery Robot
A package-delivery robot for a competition at Purdue University that required:
Designed an analog conditioning circuit for autonomous customer detection.
Implemented closed-loop PID velocity control for a differential drive.
Architected a hierarchical Finite State Machine for autonomous navigation.
Led electronics integration for a 6-person team competing in a timed package-delivery robot challenge.
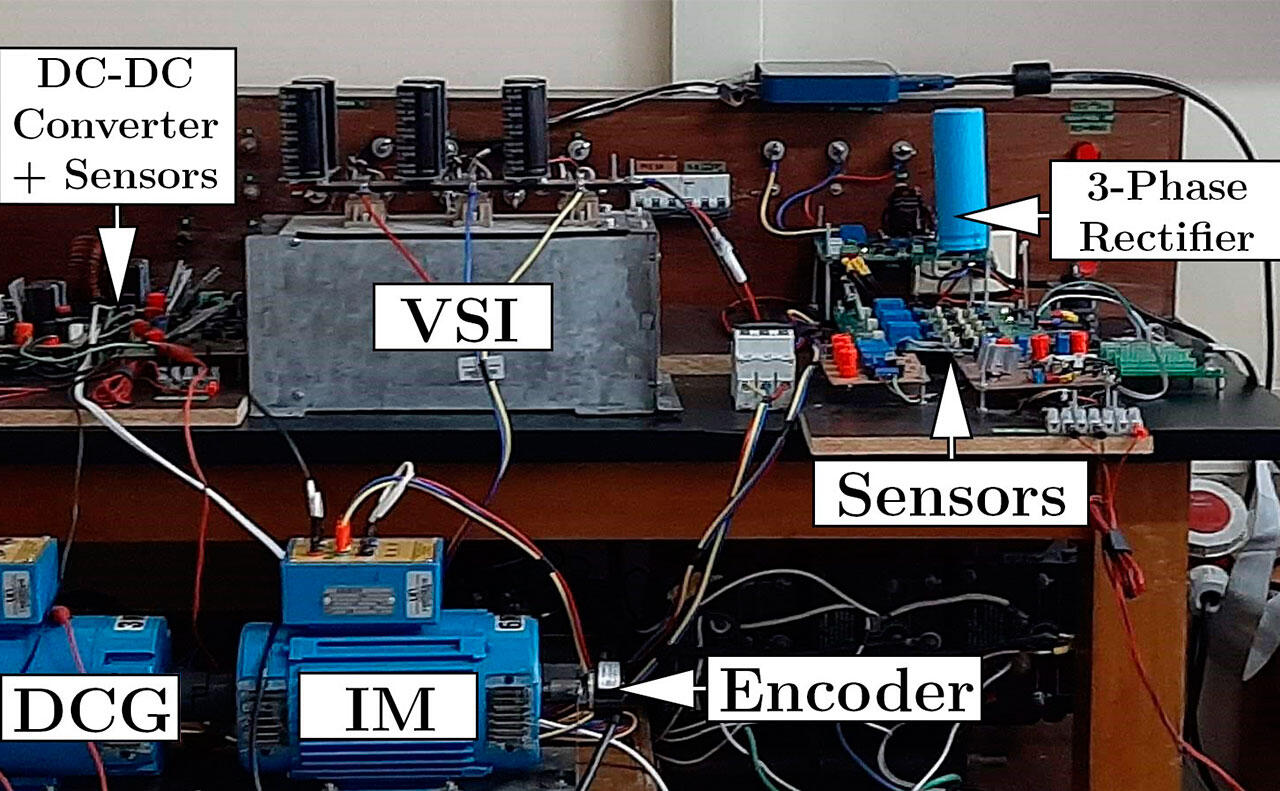
Sensorless Induction Motor Control for Electric Vehicle Applications
My master's research project focused on fault-tolerant induction motors.
Developed an algebraic estimator to extract rotor speed from stator voltage and current measurements alone.
Designed a real-time experiment with power electronics and data acquisition hardware to emulate a small-scale electric vehicle powertrain.
Validated the closed-loop sensorless controller using a standard driving cycle, achieving average speed tracking errors below 1 rad/s.